�l�b�g���[�N�𗘗p�������u�v���E���䋳��
���R �����i�R����w��w�@����w�����ȁj
���c �F�v�i�R����w����l�ԉȊw���j
1. �͂��߂�
�����A�Љ�ł͍��x��Љ�ւƋ}���ɔ��W���Ă��Ă��邱�Ƃɔ����A�Y�ƋZ�p�A��ËZ�p�C�d�q������C������A�������̐������܂ޗl�X�ȕ���ŏ��Z�p�����p����Ă���B�܂��A���ʐM�l�b�g���[�N�Z�p�̊��p��ʂ��āA�����鋫�E���z�����R�~���j�P�[�V�������\�ɂȂ�A�Љ�̃O���[�o�����͂���w�i��ł����ƌ�����B���̂悤�ɎЉ�̔��W�ɏ��Z�p���[���Z�����Ă���w�i���ӂ݁A���Z�p�Љ�Ƃ��āA��荂�x�ȏ��Z�p�E���ʐM�l�b�g���[�N�Љ�̔��W��ڎw�����߂ɁA���x���E�ʐM�l�b�g���[�N�Љ�̌`���Ƃ����S����p�\�͂̍����L�]�Ȑl�ނ̈琬��ړI�Ƃ�������������Ă���B�����ɂ́A�ue-Japan�헪�v�𒆐S�Ƃ���IT�iInformation Technology�j�v���̐��i���i�߂��A�����ʂ��Č��݂ł́uu-Japan�헪�v�𒆐S�Ƃ���������̏��Z�p�E�ʐM�l�b�g���[�N�Љ�̗v�ƂȂ�ICT�iInformation & Communication Technology�j�Љ�̐��i�̌v��C���{���傫���ւ���Ă���B�����ŐV���Ɂu�R�~���j�P�[�V�����v�Ƃ����p�ꂪ������ꂽ���Ƃ�����A�uu-Japan�헪�v�ɂ����ďd�v�ƂȂ�̂̓��r�L�^�X�E�l�b�g���[�N�Љ�̎����E���W�ɂ��u�l�Ɛl�v�C�u�l�ƃR���s���[�^�v�Ƃ������W�ł���A���Z�p��p���āu���ł��v�C�u�ǂ��ł��v�C�u���ł��v�C�u�N�ł��v�����������Ă�Ƃ����Љ��z�����Ƃɂ���B
�@���̂悤�Ȕw�i����A����Љ�̏�ɂ����āA����̕���ŋ��߂���w�͂Ƃ��āu��p�\�́v���d�������悤�ɂȂ����B�q�ǂ������̏�p�\�͂��琬���Ă������Ƃ́A������̓I�ɑI�������p�ł���\�͂���Љ�ɎQ�悷��ԓx���A����̏��Љ�ɗՂ݁A�������荂�݂ւƑn�����Ă������Љ�̌`���҂��琬���Ă������ƂɂȂ���B�����Ă���́A�w�K�w���v�̂Œ�߂��Ă���A�L���Ŋ��͂���Љ��z�����߂Ɏ���w�сC����l����͓��A���U�w�K�Љ���`�����Ă����́F�u������́v���琬���Ă������߂̏d�v�ȗv�f�ɂ��q����B�����̂��Ƃ���A���猻��ł́u����̏�v���i�߂��A���w�Z�C���w�Z�C�����w�Z�̋���ߒ���ʂ��āu��p�\�͂̈琬�v�̏[�������}���Ă���B�����܂��āA���猻��ł͊e����i�K�ɂ����đS�Ă̋��Ȋ����E���ȊO�����ɂ�������@�퓙�̊��p��A�����̐������s���Ă���B
���w�Z�i�K�ɂ����ẮA�e���Ȃŏ��̊��p���p�����Ă��钆�A��p�\�͂��琬���鋳�Ȃ̕M���ɋZ�p�ȋ���������邱�Ƃ��ł���B��p�\�͂̊ϓ_�Ƃ��ċ�������u��p�̎��H�́v�C�u���̉Ȋw�I�����v�C�u���Љ�ɎQ�悷��ԓx�v���A�Z�p�ȋ���ɂ�������Ŋw�K����e�w�K�̈�ƑΔ䂵�đ������Ƃ��A�S�Ă̊w�K���e����p�\�͂��琬���邽�߂ɕK�v�ƂȂ�A����炪�\�͂��\������d�v�ȗv�f�̏K���Ɋւ���Ă��邱�Ƃ��킩���Ă���B
�{�����ł́A�Z�p�ȋ���ɂ�������������d�v�Ȋw�K����ł���uB ���ƃR���s���[�^�v����ɂ����āA�Z�p�ȋ��炩�瓾�����b�I�E��{�I�Ȋw�͂Ə�炪���҂���w�͂����킹�čl�@���A�Z�p�ȋ�����w�K����ߒ��őI��̈�Ƃ��Ĉ�����u�v���O�����ƌv���E����v�̈�ɏœ_�āA���̗̈悪���ɏd�v�Ȉʒu�ɂ��邱�Ƃ�F�����A�{�̈�̋��ނɂ��Č��������B�{�̈�̎勳�ނƂ��āuPICNIC�iPIC Network Interface Card-kit�j�v�̊e��@�\�ɒ��ڂ��A�v���O������v���E����ɗp������e���H�E�@�퓙���������I�E���ʓI�Ɋ��p���Ď��Ƃ�W�J���Ă�����悤�ɋ��ވĂɂ��čl�@�����B��s�����Ƃ��āA�u�l�b�g���[�N�𗘗p�������u���䋳�ށi���R �����F����16�N�x�R����w����l�ԉȊw���Z�p�ȑ��Ƙ_���j�v�ɂ�PICNIC�̋@�\�����p��������@���v���O�������쐬������Ŋe�퐧�䓮��̊m�F���s���Ă��邽�߁A�{�_���ł͋��ނƂ��Ă̊ϓ_�����[�������Ă�����悤�Ɏ��g�B����ɂ��A�v���Z�p���������邽�߂̌v���p�@��i�Z���T�̊��p���j�ƌv���p�v���O�����C����Z�p���������邽�߂̐���p�@��i�A�N�`���G�[�^�̊��p���j�Ɛ���p�v���O�����C������PICNIC���ɗ��p����v���O���������쐬���A�l�b�g���[�N���𗘗p�������u�v���A����������s���A�{�̈�ɂ�����PICNIC�̋��ނƂ��Ă̗L�����ɂ��Č��������B
2. �Z�p�ȋ���ɂ�������ɂ���
���ʋ���Ƃ��Ă̋Z�p�ȋ���̋���ړI�́A�u�Z�p�y�јJ���̐��E�ւ̎�قǂ��v�ł��邱�Ƃ���A���ׂĂ̎q�ǂ��Ɍ����̋Z�p����јJ���̐��E���킪���̂Ƃ����邱�Ƃ�}�邱�Ƃɂ���B���̖ړI��B�����邽�߂ɁA�w�K��ʂ��ďK������w�͂Ƃ��āu�Z�p�I�f�{�v���K�v�s���ƂȂ�B�u�Z�p�I�f�{�v�́A�u�Z�p�Ɋւ���Ȋw�I�F���v�C�u�Z�\�v�C�u�Z�p�E�J���ρv�Ƃ���3�̊w�͗v�f�ō\������A�������O�ʈ�̂Ƃ��đ����Z�p�Ɋւ���m���E�Z�\�����p���邱�ƂŁA�����I�E�n���I�ɖ����������K���ϋɓI�ɔ��f�E���p���Ă����A���g�ŗ��p�C�Ǘ��C�]���C�������邱�Ƃ��ł��鑍���I�Ȕ\�͂̏K�����˂炢�Ƃ��Ă���B�܂��A�Z�p�͎��R�I�����I���ʂƎЉ�I�o�ϓI���ʂ������߁A���ʋ���Ƃ��Ă̋Z�p�ȋ���ł͗��Ȃ␔�w�Ȃ̊w�K���e�Ɩ��ڂɂ���������A�Љ�Ȃ�ƒ�ȓ��̊w�K���e�Ƃ����ڂɂ������ʂ�����A�e�X�̊w�K�ɂ�鐬�ʂ𑊌݂ɋK�肵�������Ƃ��m���Ă���B����͋Z�p�Ȃ̎��Ƃ݂̍�����l����ہA��ɑ�ɂ���ׂ��_�ł���B
�������l������ŁA�Z�p�ȋ���̊w�K����ł���u���ƃR���s���[�^�v���瓾����w�͂𑨂���ƁA�u��p�\�́v�C�u�R���s���[�^�̑���Z�\�v�C�u�R���s���[�^�ƎY�ƁC�����C�Љ�Ƃ̂������v�Ƃ���3�̊w�͗v�f�𒆐S�ɍ\�����ꂽ�Z�p�I�f�{�̏K������ɁA���Z�p�ɑ��Đ��k����ۑ�������ĉ������Ă����\�͂̏K�������̋���ړI�ł���ƍl���邱�Ƃ��ł���B
3. �v���O�����𗘗p�������u�v���E����
�u�v���O�����ƌv���E����v�̈�̊w�K���ނ��l�@���Ă�����ŁA���@�\�C���^�[�t�F�[�X�Ƃ��Ă�PICNIC��p���ēd�q�@���e�퓮���H���𐧌䂷�邽�߂̃v���O�������쐬���A���u�v���E������s���Ă������B�ȉ��ɍ쐬�����e��v���O������@��ɂ��ďq�ׂĂ�B
�E
�v���p�v���O����
PICNIC��������Ă��镔���̎��������Ԍo�߂̌`�ő��肷�邽�߂̌v���p�v���O�������쐬�����B���̌v���p�v���O�����ɂ���ċ����i�R���s���[�^�����j�Ŏ��Ƃ����Ȃ���قȂ�ꏊ�̏����L�^���Ă������Ƃ��ł��A���̏������Ƃɕ\�v�Z�\�t�g�𗘗p�����O���t�̕ҏW�C�O���t����ǂݎ�����̍l�@�C�v���O�����𗘗p�����O���[�v���[�N�����\�ɂȂ�B
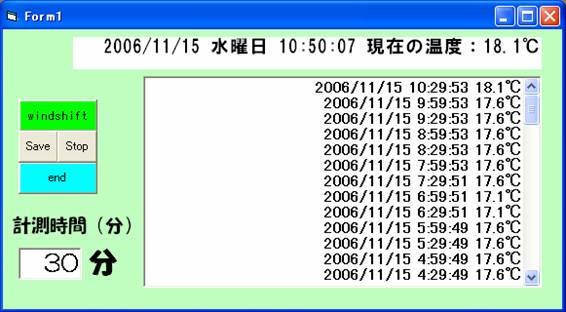
�}1�@�v���O�����̓�����
�v���v���O�����삳����Ɛ}�̂悤�ɂȂ�
�}2�@�����ϑ��O���t
�v���v���O�����Ŏ擾�����������ƂɕҏW�����I���̎����ϑ��O���t
�܂��A�A�i���O���̓|�[�g�iRA0~3�j�Ɋe��Z���T��ڑ��E���p���邱�Ƃɂ���ĉ��x�ȊO�̊ϑ����\�ł��邽�߁A���p�͈͂��L����ƍl������B�������A�Z���T����擾�ł���l�͂��̂܂܂ł͎g���Ȃ����߁A���l���o���v�Z�����Z���T�̎�ނ�K�i���l�����ăv���O�����\�[�X���ɏ���������K�v������B
�E
���u����X�C�b�`�v���O����
���u����̊�{�ƂȂ鐧��v���O�������쐬�����B���̐���v���O������p���Ď��ۂ�PICNIC�̃f�B�W�^���o�̓|�[�g�iRB4�`7�j�𐧌䂵�A���u�X�C�b�`�Ƃ���PICNIC�����p���邱�Ƃœd�q�@��𐧌䂷��B�܂��A�f�B�W�^���o�͂ɂ�鐧��͈͂͌����Ă��邽�߁A�\���b�h�X�e�[�g�����[�i�����̃����[�j�̂悤�ȓd�q���i��p������H�𒆌p���ė��p�����AC�d���@��̐��䉻�\�ɂȂ�ȂNJ��p�̕����L����B
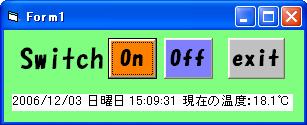
�}3�@���u����X�C�b�`�v���O�����̓�����
PICNIC�̃f�B�W�^���o�̓|�[�g�iRB4~7�j�ƘA�������X�C�b�`�v���O����
���̃v���O�����𗘗p���邱�ƂŃ����[��g�ݍ���H�ɂ��On/Off��H�┽�]��H���̊�{�ƂȂ铮��������邱�Ƃ��ł���B������p����A���ƂŃv���O�����ɂ��Ă̊w�K���e��W�J���A��H�̓��e����d�C������������e�Ɋ܂ނ��Ƃ��ł��A����̉ߒ���������鎅���ɂȂ��b�I�Ȋw�K���e���ƍl������B���̃v���O�����ł̓X�C�b�`��On/Off�݂̂������Ă��邪�A�v���v���O�����W�̎��Ƃւ̕����Ƃ��āu���݂̏v���ڂ�lj����Ă���B���̃v���O�����ɒlj��@�\�Ƃ��Čv���v���O�����̍쐬���\���ƍl���Ă��邽�߁A���p�ł���v���O�����Ƃ��Ċ�{�I�v�f�݂̂̃v���O�����ƂȂ��Ă���B
�E
2��ȏ��PICNIC�𗘗p���鐧��v���O����
���u�X�C�b�`�Ƃ��Ă̐���v���O������p������@�ŁA�O�q�������@�̂ق���2��ȏ��PICNIC��p������@�������B1���M�����o�p�Ƃ��C�c���PICNIC�����u����p�Ƃ��ėp���邱�ƂŌ��o�i�v���j�n�_�Ɣ����i����j�n�_�Ƃ��킯�Ĉ������Ƃ��ł���B���̂悤��2��ȏ��PICNIC������s������p�v���O�������쐬�����B
�}4�@�ꊇ����v���O�����̓�����
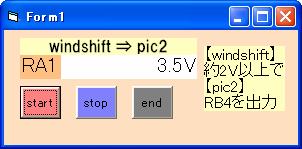
PICNIC��2��ȏ�A��������v���O����
���̃v���O�����ł́A���o����PICNIC1���ڑ������Z���T�����2V�ȏ㑊���̐M�������o����Ɛ��䑤��PICNIC2�̔C�ӂ̃f�B�W�^���o�̓|�[�g������iHigh�j����悤�ɐݒ肵�Ă���B����ɂ���ė��ꂽ�ʒu�ɂ��镡�����PICNIC��A�������邱�Ƃ��ł���B
�����PICNIC1�ɑ��z�d�r��ڑ����A��2V�̔��d�����o�����PICNIC2�̃f�B�W�^���o�̓|�[�g�iRB4�j��High�ɂ���悤�ɂȂ��Ă���B���z�d�r�̎g�p�ȊO�ɂ��A�l�X�ȃZ���T�̊��p�C�A�i���O���ͥ�f�B�W�^�����o�̓|�[�g��X�C�b�`�ɐݒ肵�đ���PICNIC�삳���邱�ƁC��������̒������A�v���O�����ɂ�鐧�䂪��{�ƂȂ�̂Ő���҂̈Ӑ}����C�ӂ̐ݒ肪�\�ɂȂ�B
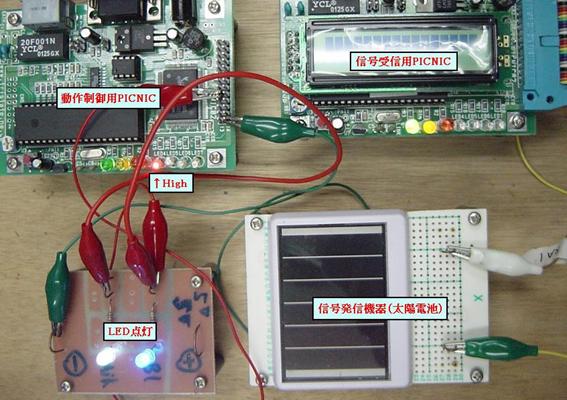
�}5�@PICNIC�̓���FLED�_��
�M�����M�@��i���z�d�r���j����M����M�pPICNIC�����M���̒l�������������ہA�l�b�g���[�N����ē��쐧��pPICNIC�ɐڑ����Ă���LED���_��
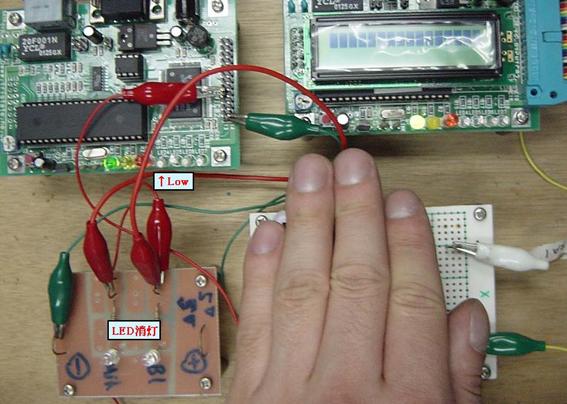
�}6�@LED��������
�M���̐��l�����������Ȃ���A�l�b�g���[�N�����LED������
�E
���{�b�g�A�[������v���O����
��{�I�Ȑ��䋳�ނƂ��ė��p����郍�{�b�g�A�[��MR-999�i�J���F�i���j�C�[�P�C�W���p���j��PICNIC�̃f�B�W�^���o�̓|�[�g�̑g�ݍ��킹�𗘗p���Đ��䂷��B�g�p���郍�{�b�g�A�[���͉��ӏ���5�ӏ��i�w�C���C�I�C���C���j����A��̉��ӏ���2��ނ̓������s���悤�ɂȂ��Ă��邽�߁A�v10�ʂ�̓����𐧌䂷��K�v������B�܂��A�ʓr�Ŕ̔�����Ă���3��ނ̃C���^�[�t�F�[�X�iUSB�C�V���A���CLAN�j�ƒʐM�\�t�g�i�n�C�p�[�^�[�~�i�����j�Ńp�\�R���Ɛڑ����邱�Ƃ��ł��A���u����������ۂɗp���₷�����ނ̈�Ƃ�����B�{�߂ł�PICNIC��p���A���{�b�g�A�[���𐧌䂷�邱�Ƃ����������B
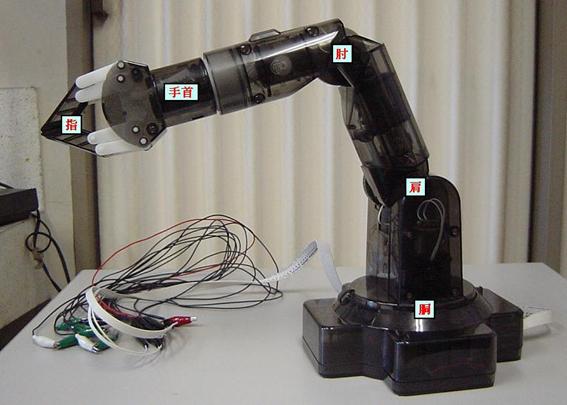
�}7�@����p���{�b�g�A�[���iMR-999�j
�i���j�C�[�P�C�W���p����
�}�V�̃��{�b�g�A�[���̊e������ʂɐ��䂷�邽�߂̃v���O�������쐬���APICNIC����̃f�B�W�^���M���Ɏu�������������Đ��䂷�邽�߂ɒ��p��i�f�}���`�v���N�T��H�j���쐬�����B
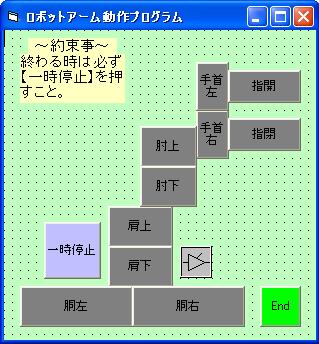
�}8�@���{�b�g�A�[������v���O����
PICNIC�̏o�͂̑g�ݍ��킹�Ŋe������ʂɐ��䂷�邽�߂̃v���O����
���̃v���O�����ł͑���p�l���i�R�}���h�j�ɋL���Ă���e��������{�b�g�A�[���ɓ��삳����悤�ɍ쐬�����B���̑�����s�����߂�PICNIC�̎��f�B�W�^���o�̓|�[�gRB4~7��4�o�͂̑g�ݍ��킹�i16�ʂ�j�𗘗p����i�\1�j�B
�\1�@���{�b�g�A�[������̏o�͐���ݒ�
�o�͂�4bits�ƍl���āA16�ʂ�̏o�̓p�^�[���̂���10�ʂ�̑g�ݍ��킹��p����
|
4bits |
�o�͐� |
�o�͐� |
|
4bit ���� | 1 �^16�o�� �Ή��\ |
0000 |
�@ |
0 |
|
0001 |
���E |
1 |
|
|
0010 |
��� |
2 |
|
|
0011 |
���� |
3 |
|
|
0100 |
���� |
4 |
|
|
0101 |
���� |
5 |
|
|
0110 |
���E |
6 |
|
|
0111 |
�I�� |
7 |
|
|
1000 |
�I�� |
8 |
|
|
1001 |
�w�� |
9 |
|
|
1010 |
�w�J |
10 |
|
|
1011 |
�@ |
11 |
|
|
1100 |
12 |
||
|
1101 |
13 |
||
|
1110 |
14 |
||
|
1111 |
15 |
PICNIC�ƃ��{�b�g�A�[���ԂŁA��L�̂悤�ɐݒ肵���f�B�W�^���o�͐M���̑g�ݍ��킹��L���ɂ��邽�߂ɒ��p��i4bits����j���쐬�����B���p��Ƀf�}���`�v���N�T�iHD74154�j��g�ݍ��ނ��ƂŁA�e�p�^�[���i4bits�j�ɑΉ������o�͐�삳����iOutput0~15�j�B�f�}���`�v���N�T�ɂ́A��̓��͐M���₢�����̑I�𐧌���͐M�����̏o�͒[�q�֓��͐M���̕��z�����铭���������Ă���
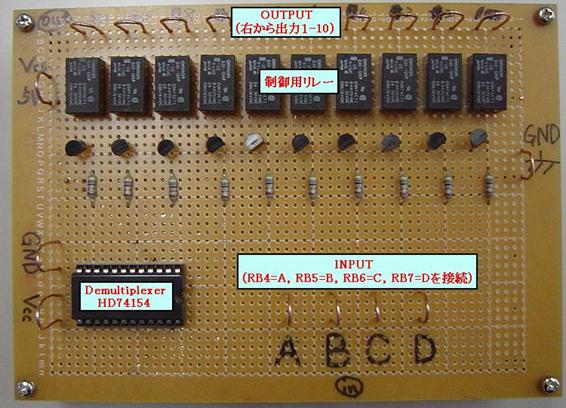
�}9�@���p��i4bits����j
�쐬�������p��i4bits����j�̊T��
�}10�@���p��i4bits����j��H�}
Demultiplexer�ɂ��Active Low���l��������H
�E
�g�ђ[���𗘗p�������u����
�����ł̓v���O�����͍쐬���Ȃ����APICNIC�͓������ꂽ�t�@�[���E�F�A�iPIC16F877���j�����������邱�ƂŁA�l�b�g���[�N�ڑ����\�Ȍg�ђ[�����璼�ڐ��䂷�邱�Ƃ��ł���B�X�V�p�t�@�[���E�F�A�͐������ł���i�L�j�g���C�X�e�[�g�ЂɂĎ擾���邱�Ƃ��ł���B���̂Ƃ��APICNIC�ɓƗ����ė^���Ă���IP�A�h���X�͏���IP�A�h���X�ɂȂ�̂ōēx�̐ݒ肪�K�v�ɂȂ邪�A�����̎�Ԃ��s���Όg�ђ[������PICNIC�����u����ł��邱�ƂɂȂ�B
�ŋ߂ł́A�l�b�g���[�N�ڑ����\�ł���g�ѓd�b�͍L�����y����A������Ώ��w���ł����p�ł�����̂ɂȂ��Ă���B���̂��Ƃ���A����̒��w���ɂƂ��čł��g�߂Ȍg�ђ[���Ƃ��ċ����邱�Ƃ��ł��A�@��̑�����ꂩ�狳����K�v�������ł��L���ȋ@��ł���ƍl������B���̌g�ѓd�b�̃l�b�g���[�N�ڑ��@�\�����p����PICNIC���牓�u������s�����ނ̈�Ƃ��čl�����B
�{���A�g�ѓd�b�����Ƃŗp���邱�Ƃ͏W���͂��������̗��R�ŋ��猻��ł͔������邱�Ƃ��قƂ�ǂ����A����Љ�ɐ����鐶�k�����ɂƂ��Đ����ɍł����ڂɊW���Ă���g�ѓd�b����ނƂ��ėp���闘�_�͑����B�u�g���ē�����O�v�Ƃ����l�������u���̎g����̂��v�Ƃ��������������邽�߂̍l�����Ɏw�����Ă������Ƃ��ł��邾�낤�B�ڂł͌��邱�Ƃ��ł��Ȃ������𑨂�������Ƃ̓W�J���s�������ŁA�g�ѓd�b�̗��p�͕K�v�ł���ƍl������B
PICNIC�ɂ͓Ɨ�����IP�A�h���X�����蓖�ĂĂ��邽�߁A�l�b�g���[�N�ڑ��@�\�����g�ѓd�b����ȉ��̃A�h���X����͂��邱�ƂŐڑ���ԂɂȂ�B
http://[ IP�A�h���X
]or[ PICNIC�ŗL��].[�h���C����]/
�\�����ꂽ�����[�gI/O��ʂ���C�ӂ̃f�B�W�^���o�̓|�[�g�iRB4~7�j�̑�����s����B���̑���ɂ���ĉ��u�X�C�b�`�Ƃ��Ă�On/Off���\�ɂȂ�APICNIC�ɐڑ����ꂽ�@��ňӐ}���铮��������邱�Ƃ��ł���悤�ɂȂ�B
�܂��A����PICNIC�ɑ��ē����ڑ��͉\�ł��邪�A�����o�̓|�[�g���ɐ��䂵�Ă���Ԗڂ̐M���ŏ�������������Ă��邽�߉e���͖����B�����ĕ����̌g�ѓd�b����Ⴄ�o�̓|�[�g�̐�����s���Ă��APICNIC�͏�����������őΉ����Đ�����J�n����̂ō����͂��Ȃ��B

�}11�@�g�ѓd�b�ɂ�鉓�u����
�f�B�W�^���o�̓|�[�g�iRB7�j�����u����
4. �u�v���O�����ƌv���E����v�ɂ�����w�K�w���v��
���w�Z�i�K�ɂ�����Z�p�ȋ���̎��Ǝ����́A1�C2�N���ł́u�Z�p�E�ƒ�ȁv�Ƃ���70���ԁC3�N���ł�35���Ԉȓ��ƒ�߂��Ă���B����āA�Z�p�ȁC�ƒ�ȋ��Ɏ��Ǝ��Ԃ�邱�ƂȂ��z�����Ă������߁A1�C2�N����35���ԁC3�N���ł�17.5���ԂƂ����z�����Ԃ��w�K�ň������ƂɂȂ�B���̏����ɂ����ċZ�p�ȋ���̊w�K���e�������ہA2����uA �Z�p�Ƃ��̂Â���v�y�сuB ���ƃR���s���[�^�v�ɂ����邻�ꂼ��̕K�C�w�K�̈�ł���i1�j�`�i4�j���ڂ�S�Ă̐��k�ɗ��C�����A�e����̑I�𗚏C�ƂȂ�i5�j�`�i6�j���ڂɂ��Ă�1����2���ڂ𗚏C������悤��3�N�Ԃ̊w�K�w���v����l���Ă����K�v������B�܂��A�e���ڋy�ъe���ڂɎ��������ɂ��ẮA���݂ɗL�@�I�Ȋ֘A��}��A�����I�ɓW�J�����悤�ɓK�ȑ�ނ�ݒ肵�Ċw�K�w���v����쐬����K�v������B
�@�ȏ�܂��A�Ώۊw�N��3�N���ƍl�����u�v���O�����ƌv���E����v�̈�ɂ�����w�K�w���v��̎��Ă��������A�ȉ��̕\2�ɂ܂Ƃ߂�B�܂��A�O�q�����w�K�w���v�掎�Ăɂ�����]���K����\�R�Ɏ����B
�@�����Œ�Ă��Ă���w�K�w���v��̎��ċy�ѕ]���K������ɂ������Ƃ͎c�O�Ȃ���s���Ă��Ȃ����߁A�����̏C���C������i�߂邱�Ƃ͂ł��Ȃ����A����̉ۑ�Ƃ��Č������Ă������߂Ɏ��H���s���A�����̓��e�����{���邽�߂̊������i�w���́C���ށC��ށC���ԓ��j���č\�z���Ă������Ƃ��d�v�ł���ƌ�����B
�\�Q�@�u�v���O�����ƌv���E����v�w�K�w���v�掎��
�S15���Ԃ̎w���v��ƂȂ�
|
�u�v���O�����ƌv���E����v�w���v�掎�� |
|||||
|
��ޖ� |
���� |
�w�K���� |
�˂炢 |
��Ȋw�K���� |
�w����̗��ӓ_�E�֘A |
|
�v���E ����̊�{ |
1.5 |
1�D�u�v���v�C�u����v�ɂ��Ēm�낤 |
�u�v���v�C�u����v�ɂ��ĕ������k�̃C���[�W�Ɣ�r���āA�{���̊T�O�E��`�𗝉�����B |
���u�v���v�C�u����v�ɑ���C���[�W���m�F����B |
�E���k�����w�K�O�̃C���[�W�E�m�����A�w�K��ł͂ǂ̂悤�ɍč\�z���ꂽ���m�F�ł���悤�ɁA�K���w�K�m�[�g���ŋL�^���Ă����B |
|
���u�v���v�E�u����v�̒�`��m��A�g�߂Ȋ��p�����ɊT�O�𑨂���B |
�E��`�𑨂��₷���悤�ɁA���p��ɐ��k�̐����T�O�ƌ��ѕt���₷�����̂�p���邱�ƁB |
||||
|
�g�߂Ȑ����ɗ��p���ꂽ�v���C����Z�p�ɋC�Â��A�����̋Z�p���\�����镔���ɂ��čl���邱�Ƃ��ł���B |
������̎�ނ�m��A�e�X�̓���̓����ɂ��āA���p���ʂ��đ�����B |
�E����̎�ނƂ��āu�蓮����v�C�u��������v�������A��������́u�V�[�P���X����v�C�u�t�B�[�h�o�b�N����v��2�̗p��������B |
|||
|
1.5 |
2�D�v���E����Z�p�ɕK�v�ȋ@��C���i���l���悤 |
�v���E����ɕK�v�ƂȂ�Z���T�C�A�N�`���G�[�^�C�C���^�[�t�F�[�X�C�R���s���[�^�̊W�i�����j�𑨂��A���ꂼ��̓����ɂ��ė�������B |
���u�l�Ԃ̌܊��v�Ɓu�@�B�Ō܊���\������ꍇ�v�Ƃ�Δ䂵�đ����A�Z���T���ǂ̂悤�Ȗ�����������������B |
�E�Z���T�C�A�N�`���G�[�^�C�C���^�[�t�F�[�X�C�R���s���[�^�ɂ��Ĉ����ۂ͖����Ǝ�ނɗ��߁A�@�B�I�E�d�C�I�\�����̓��e�ɐ[���肵�Ȃ��悤�ɒ��ӂ���B |
|
|
�v���E����Z�p���S�������ɂ��Ēm��B |
���l�Ԃ̊��o��⏕�E����v�f�Ƃ��Ă̋Z�p�𑨂��邽�߂ɁA�l�Ԃ̓���ɗႦ�����J�g���j�N�X�i�Z���T�C�A�N�`���G�[�^�C�C���^�[�t�F�[�X�C�R���s���[�^�j�ɂ���A�̓����m��B |
�E�u����͂ށv���̈�A�̓�����A�Z���T�C�A�N�`���G�[�^�C�R���s���[�^�ɂ�郁�J�g���j�N�X�̓���ŗႦ�A�l�Ԃ̕⏕�E�Ƃ���������F���ł���悤�ɐ}����p����B |
|||
|
�R���s���[�^�ɂ��v���E���� |
2.0 |
3�D�R���s���[�^���g���Čv������������@��m�낤 |
�u�R���s���[�^�v�ƌĂׂ�@��Ƃ͉�����������B |
���g�߂ɂ���R���s���[�^�Ƃ��ĉ����������邩�l����B |
�E�g�߂ɂ���u�R���s���[�^�v�Ƃ��ăp�\�R���ȊO�ɉ������邩�F�����邽�߂ɁA�R���s���[�^�̊�{�I�ȋ@�\�i���́C�o�́C���Z�C����C�L���j�������Ȃ��狳�����Ă����B |
|
�R���s���[�^����ɕK�v�ƂȂ�v�f�i���̌��m�C�����E���f�C�d���i�v���E����j�̖��߁j�ɂ��ė�������B |
���R���s���[�^����ɕK�v�Ȃ��ƂƂ͉����l����B |
�E�R���s���[�^����̏�����P�������čl������悤�Ɂu���̌��m�v�C�u��������f�v�C�u�d���i���߁j�v��3�𒆐S�Ɉ����Ă����B |
|||
|
�R���s���[�^����̎�ށE���@�ɂ��Ēm��B |
���R���s���[�^�𗘗p���Čv���E���䂷���̓I�ȕ��@�ɂ��čl����B |
�E��������̎�ނ��ɂ��Ȃ���A�e��������肷�邽�߂́u�v���O�����̗��p�v�������B |
|||
|
2.0 |
4�D�R���s���[�^���g���Čv���E��������悤�@�i�v���j |
�K�v�ȏ����v���O�����i�R���s���[�^�j�Ŏ擾���邱�Ƃ��ł���B |
���Z���T�𗘗p�����v���p�v���O�������N�����Ď������v������B |
�E�R���s���[�^�ƃZ���T���q���C���^�[�t�F�[�X�Ƃ���PICNIC��p����B |
|
|
�擾���������𐄑����邱�Ƃ��ł���B |
���擾����������ɐ��l�̐�����l�@������B |
�E�v���p�v���O�����͋��t����������B�v���O�����̓����ɂ��Đ��������n�߂�Ƃ��Ɍv�����J�n���Ă����B |
|||
|
1.5 |
5�D�R���s���[�^���g���Čv���E��������悤�A�i����j |
�O���@����v���O�����i�R���s���[�^�j�Ő���ł���B |
���C���^�[�t�F�[�X�i�f�}���`�v���N�T�j��PICNIC�𗘗p���ă��{�b�g�A�[���𐧌䂷��B |
�E����p�v���O�����͋��t����������B�v���O�����̓����ɂ��ĊȒP�ɐ������Ă����B |
|
|
�v���O�����ŋ@��𐧌䂷��ߒ��𗝉��ł���B |
�����{�b�g�A�[���ʼnۑ����������B |
�E����̉ۑ��^���āA�ړI�ɉ����������������B |
|||
|
����ɕK�v�Ȋe���ʁi���_�C���]�C�葫�j�Ƃ�藣���đ����邱�Ƃ��ł���B |
������ߒ��S�i���_���C���]���C�葫���j���ĉۑ����������B |
�E���_������C���]��������ߒ����l���Ďw�����o���C�葫�����v���O���������ĖړI�ɉ����������������B |
|||
|
�v���O�����̊�{ |
1.5 |
6�D�v���O��������ɂ��čl���悤 |
�v���O�������쐬���邽�߂ɕK�v�ƂȂ錾��̈Ӗ��C�����ɂ��ė����ł���B |
���v���O�������\������u�v���O��������v�̎�ނ⓭���ׂ�B |
�E���܂�[���肵�Ȃ��悤�Ɍ���̐��Ɗ�{�I�Ȍ���uC����v�C�uBasic����v�C�uPerl����v���̖��̂����������A���ʂ���������������B |
|
�v���O��������ɂ��쐬�̃��[���i���ߕ��j�ɂ��ė�������B |
���v���O�������쐬���邽�߂̖��ߕ��ɂ��Ēm��B |
�E���܂�[���肵�Ȃ��悤�Ɏ�Ȗ��ߕ��������B |
|||
|
�v���O�����ɂ��d���̗�����l������B |
���X�g�[�u�Ɖ��x�v�𗘗p���Ď������������䂷��ߒ����l����B |
�E�d���̗����������悤�Ƀt���[�`���[�g�}�𗘗p���āu���������^�v�C�u�����J��Ԃ��^�v�C�u��������^�v�������B |
|||
|
2.0 |
7�D�v���O�������쐬���悤�@�i����X�C�b�`�j |
�ړI�ɍ������v���O�������쐬�ł���B |
��PICNIC�𗘗p�������u�X�C�b�`�v���O�������쐬����B |
�E�ݒ肪��������͋��t�����炩���ߏ������Ă����B�v���O�����\�[�X�̏������̓v�����g���Ŏ����Ă����B |
|
|
���쐬�����v���O�����ŋ@��𐧌䂷��B |
�E���䂷��ΏۂƂ��āA���[�^�C�u�U�[�CLED���̔�����������������̂�p����B |
||||
|
2.0 |
8�D�v���O�������쐬���悤�A�i�����킹�Q�[���v���O�����j |
�v���O�������H�v���č�邱�Ƃ��ł���B |
���v���O�����ŊȒP�ȃQ�[�����쐬����B |
�E���ȏ��̎Q�l�\�[�X����ɁA�H�v���č���悤�ɂ���B�������ߕ��̌��̓v�����g���Ŏ����Ă����B |
|
|
���쐬�����Q�[���ŗV��ł݂�B |
�E���k�����݂��ɍ�����v���O�����i�v���O�����Ɋ�{�\���͓����j�ŗV�ׂ�悤�ɂ���B |
||||
|
�������̐����ƌv���E����Ƃ̂������ɂ��� |
1.0 |
9�D�v���E����̔��B�̂悤����m�낤 |
�Љ�ŗ��p����Ă���v���E����Z�p�ɂ��Ēm��B |
���R���s���[�^�̏��^���ȂǁA����̋Z�p�ɂ��čl����B |
�E�Z�p�̔��W�̗��j����̋@��i�J�����C�g�ѓd�b���j����l���A���^�����̋@��̋@�\�◘�����̕ω��ɋC�����悤�ɔz������B |
|
�v���E����Z�p�̔��W�ɂ��ė�������B |
���v���E����Z�p���Ȃ����W���Ă������l����B |
�E�{�̈�̏��ՂɊw�u�l�Ԃ̕⏕�E�v�Ƃ����T�O����ɍl������悤�ɂ���B |
|||
|
���r�L�^�X�E�l�b�g���[�N�Љ���ӎ����čl������B |
���g�߂ȃR���s���[�^�F�g�ѓd�b����l������u�ǂ��ł��R���s���[�^�v�Ƃ͉����l����B |
�EPICNIC���g�ѓd�b���牓�u���삵�āA�R���s���[�^�Ƃ����ӎ��������A�����I�ȏ��Љ�̔��W�i���r�L�^�X�E�l�b�g���[�N�Љ�j�ɂ��čl������悤�ɔz������B |
|||
|
���v |
15.0 |
|
|
|
|
�\�R�@�e�w�K���e�ɂ�����]���K��
�u�v���O�����ƌv������v�w�K�w���v�掎�Ă̕]���K���i�āj
|
�@ |
������Z�p�ւ� �S�E�ӗ~�E�ԓx |
�������H�v���n������\�� |
�����̋Z�\ |
������Z�p�ɂ��Ă� �m���E���� |
|
|
1 |
�v���E����Z�p��p�����g�߂ȋ@��ɊS�������A�ӗ~�I�ɒ��l���Ă���B �@ |
�e�탁�f�B�A�i�G���C�C���^�[�l�b�g���j�𗘗p���āA�v���E����@��ɂ��Ē��ׂ���B |
|
�v���E����̒�`�C�T�O�������A�ȒP�ɐ����ł���B |
|
|
����̎�ނɂ��ė������A�ȒP�ɐ����ł���B |
|||||
|
2 |
�v���E����Z�p�Ɛl�Ԃ̌܊��Ƃ̂������ɑ��ĊS�������A�i��ŃZ���T�̋@�\�l���Ă���B |
���J�g���j�N�X�v�f�̊��p���@�𗝉����āA����̃A�C�f�B�A���H�v���n���ł���B |
|
�l�Ԃƌv���E����Z�p�����ѕt���đ����A�܊��ɓ�����Z���T�̓������ȒP�ɐ����ł���B |
|
|
�v���E����Z�p�̃��J�g���j�N�X�v�f�i�A�N�`���G�[�^���j�ɑ��ĊS�������A�ӗ~�I�ɒ��l���Ă���B |
���J�g���j�N�X�v�f�̊e�����𗝉����A�e�v�f�ɂ��ĊȒP�ɐ����ł���B |
||||
|
3 |
�R���s���[�^�ɋ����������A�i��œ������l���������悤�Ƃ��Ă���B |
|
�R���s���[�^�̊�{�I�ȋ@�\����ɑ��삷�邱�Ƃ��ł���B |
�R���s���[�^�̊�{�I�ȋ@�\�𗝉����A����ɂ��ĊȒP�ɐ����ł���B |
|
|
�R���s���[�^�ɂ�鐧��ɊS�������A���̋�̓I�ȕ��@�ɂ��Ĉӗ~�I�ɍl���Ă���B |
�R���s���[�^���v���E����Z�p���s�������ɂ��ė������A�v���O�����̗��p�����ȒP�ɐ����ł���B |
||||
|
4 |
�v���O�����ɂ��v���E�ҏW�E�l�@���ɐϋɓI�ɎQ�����Ă���B |
�v���v���O���������p���āA���̗v�f�i�Ɠx�C���x���j���v������A�C�f�B�A�̍H�v���l������B |
�v���v���O�����ƕ\�v�Z�E���������v���O�����̊�{�I�ȑ���𗝉����A����ł���B |
�����̗���𗝉����A�d�g�݁E�菇���ȒP�ɐ����ł���B |
|
|
5 |
�v���O�����ɂ�鐧��ɐϋɓI�ɎQ�����Ă���B |
�l�Ԃɂ��[���I����̐���ߒ����H�v���čl���A���s���邱�Ƃ��ł���B |
����v���O�����̊�{�I�ȑ����m��A���{�b�g�A�[���𑀍�ł���B |
�����̗���𗝉����A�d�g�݁E�菇���ȒP�ɐ����ł���B |
|
|
����ɕK�v��3�v�f�i���_�C���]�C�葫�j�ɊS�������A�ϋɓI�ɎQ�����Ă���B |
|||||
|
����ߒ��̊e����̖����𗝉����āA�l�Ԃɂ��[���I���삪�ł���B |
����ɕK�v�Ȋe�ߒ��̖����ɂ��ė������A�ȒP�ɐ����ł���B |
||||
|
6 |
�v���O��������ɋ����������A�ӗ~�I�ɒ��l���Ă���B |
�������ׂ̈ɁA�ړI�ɍ������v���O�����ߒ����H�v���A�l�Ă��邱�Ƃ��ł���B �@ |
�v���O�����̊�{�I�ȍ\�����@�𗝉����A�ړI�ɍ������d���̗�����l�Ă��邱�Ƃ��ł���B �@ |
�v���O��������̖�ڂ⓭���ɂ��ė������A�ȒP�ɐ����ł���B |
|
|
�v���O�����̍쐬���@�E�菇�ɊS�������A�ӗ~�I�ɍl�����g�����Ƃ��Ă���B |
�v���O�����̍쐬���@�E�菇�ɂ��ė������A�ȒP�ɐ����ł���B |
||||
|
7 |
�v���O�����̍쐬�Ɉӗ~�I�Ɏ��g�݁A�i��Ŏ����E�Q�����Ă���B |
����v���O�����̋@�\��lj�����A�C�f�B�A���l���A�H�v���邱�Ƃ��ł���B |
�ړI�ɍ������v���O�������쐬�̂��߂Ƀ\�t�g�E�F�A��p���Ċ�{�I�ȑ��삪�ł���B |
����v���O�����̊�{�I�ȍ\���𗝉����āA�ȒP�ɐ����ł���B |
|
|
8 |
�v���O�����̍쐬�Ɉӗ~�I�Ɏ��g�݁A�i��Ŏ����Q�����Ă���B |
�ړI�ɍ����悤�Ƀv���O�������H�v���č쐬�ł���B |
��{�I�ȏ���菇�𗝉����A�ړI�ɉ������v���O�������쐬�ł���B |
�v���O�����̍쐬���@�E�v�f���𗝉����A�ȒP�ɐ����ł���B |
|
|
9 |
���W������Z�p�ɋ����������A���Z�p�������炷����E�����I���W�ɂ��Ĉӗ~�I�ɍl���Ă���B |
���u���쓙�̐���Z�p�̔��W����ɁA�����ɍH�v���ėp����A�C�f�B�A���l���邱�Ƃ��ł���B |
�g�ѓd�b�̃l�b�g���[�N�ڑ��@�\�����p����PICNIC�����u����ł���B |
���Z�p�̔��W�ɂ��ė������A�R���s���[�^�̏��^�����ɂ�鐶���̌���ɂ��ĊȒP�ɐ����ł���B |
|
|
�g�ѓd�b�����^�����ꂽ�R���s���[�^�ł��邱�ƂɊS�������Ă���B |
���Z�p�̔��W�������炷�����I�ȓW�]�ɂ��ė������A���r�L�^�X�E�l�b�g���[�N�Љ�ɂ��čl�@�ł���B |
5. �܂Ƃ�
�����̏�Љ�ɂ����āA����ɔ����Z�p�̔��W�͒��������̂�����B�����āA��Љ�ɐ�����q�ǂ������ɂƂ��āA���Z�p�͔��ɐg�߂Ȕ͈͂Ő����ɐZ�����A���ꂪ���Z�p�ł��邱�Ƃ��ӎ������Ƃ��g�p���C���p���Ă���B���ɁA�R���s���[�^�������ɗ^���Ă���e���͔��ɑ傫���A���̊Ǘ�����o�ϊ����C��ËZ�p�C��y�Ɏ���܂ł������ʂŊ��p����Ă���B���ʁA�ڂɌ����Ȃ��͈͂ŗ��p����Ă�����Z�p�Ɋւ��Ắu�R���s���[�^�𗘗p���Ă���v�Ƃ��������T�O������ɂ����̂�����ł��낤�B�Ⴆ�A�q�ǂ������̍ł��g�߂ȋ@��̈�Ƃ��Čg�ѓd�b���������邪�A���́u�g�ѓd�b�v���u�R���s���[�^�v�Ƃ��ĔF�����Ďg�p���Ă���q�ǂ��͂ǂꂾ�����݂��邾�낤���B�q�ǂ������ɂƂ��āA�g�ѓd�b�́u�����^�т��֗��ȓd�b�v�ł����āu�l�b�g���[�N�i�C���^�[�l�b�g�j�ڑ����\�ȕ֗��ȓd�b�v�ƂȂ�B�R���s���[�^���`�t����5�̋@�\�F�u���́v�C�u�o�́v�C�u���Z�v�C�u����v�C�u�L���v���l����ƁA�g�ѓd�b�͗��h�ȃR���s���[�^�Ƃ��ċ����邱�Ƃ��ł��邪�A���̂��Ƃ��ӎ����Ȃ��Ă������Ɏx��͋N���炸�A�m��Ȃ��Ă��g����Ƃ����ӎ������邱�Ƃ͔ے�ł��Ȃ��B�������Ȃ���A���E�̒��ŏ��Z�p�Љ�ɂ�����IT��i����ڎw���K�v������ȏ�A���x��Љ�����ŏ��Z�p���ӎ����đ����Ȃ���A���x���E�ʐM�l�b�g���[�N�Љ���`�����C�����S����p�\�͂̍����L�]�Ȑl�ނ��琬���邱�Ƃ͂ł��Ȃ��B���̗l�Ȍo�܂���A����2�N�ɕ����Ȃ��쐬�����u���Ɋւ������v����Ɂu����̏�v�����i����A�����Ȋw�Ȃɂ����IT�v���ɂ��IT�Љ�̌`������Љ�̊�Ր�����ڎw�����ue-Japan�헪�v�C�ue-Japan�헪�U�v���g���܂ꂽ�B�ŋ߂ł͐V���ɏ��ʐM�l�b�g���[�N�Љ�����������uu-Japan�헪�v���g���܂�Ă����B��������ɁAICT���p��i��łł��鎟����̐l�ނ��琬���鋳�炪��������Ă���B���̒��ŋ������Ă���u��p�\�͂̈琬�v���d�v�Ȋϓ_�Ƃ��đ������A���w�Z�C���w�Z�C�����w�Z�Ƃ����w�K�E���B�i�K��A���I�ɑ����ď����s���Ă������ƂŁA�\�͂��琬���Ă������Ƃ��˂炢�Ƃ��Ă���B���̔\�͂��琬����ɓ�����A��{�I�ɂ͑S���ȁC���犈����z�肵�ď��Z�p�����p����@������o���Ă��邪�A���w�Z�i�K�ɂ����ď�����I�Ɉ����A��p�\�͂̈琬�ɂƂ��ďd�������3�v�f�F�u��p�̎��H�́v�C�u���̉Ȋw�I�ȗ����v�C�u���Љ�ɎQ�悷��ԓx�v�����w�K�ł���d�v�ȋ��ȂƂ��ċZ�p�ȋ��炪��������B
�{�����ł́A�Z�p�ȋ���ɂ�������������d�v�Ȋw�K����ł���u���ƃR���s���[�^�v����ɂ����āA�I��̈�Ƃ��Ĉ�����u�v���O�����ƌv���E����v�����w�͂���ɁA�{�̈�̏d�v�����l�@���A�w�K���ނƂ���PICNIC����Ɉ������v���O�����C�v���E����@��ɂ��Č��������B��p�\�͂̈琬��ړI�Ƃ������w�Z�i�K�ɂ���������������Ă������߂ɁA�Z�p�ȋ��炪�S����番��͏d�������ׂ�����ɂȂ��Ă���B���̒��ŁA�I��̈�ł���u�v���O�����ƌv���E����v�̈悩�瓾�����p�\�̗͂v�f�͑��̈�ł͓�����̂ł��邪�A����ł͖{�̈�𗚏C���邽�߂ɕK�v�ƂȂ�������i�w���́C���ށC��ށC���ԓ��j�̐������\���ɍs���Ă��Ȃ����߁A�K�R�I�Ɂu�R���s���[�^�𗘗p�����}���`���f�B�A�̊��p�v�̈悪�I������Ă��܂��Ă��邱�Ƃ������B���̏����P���A���k�̋����E�S�ɉ����đI�𗚏C���Ă�����悤�ɁA�{�̈���w�K���邽�߂̋��ވĂƂ���PICNIC�𒆐S�Ƃ����e��v���O��������Z�p�����p�����e��@��C��H�̊��p���@�������Ă����B����ɂ��A�v���E���䋳�ނ̈�Ƃ��āAPICNIC�����ɗL���ł��邱�Ƃ��������B
����̌����ۑ�Ƃ��āA�{�̈�̊w�K���e�����ۂɓW�J���Ċw�K�w���v���]���K�������P���A���[�������w�����l�@�E�������Ă��������B
[ �Q�l�����A���� ]
1�u���w�Z�w�K�w���v�́i����10�N12���j ����|�Z�p�E�ƒ�ҁ|�v�C�����ȁC1999�D
2�u�Z�p�E�ƒ�m�Z�p����n�v�C�J�����o�ŁC2006�D
3�u�V�ҁ@�V�����Z�p�E�ƒ�@�Z�p����v�C�������ЁC2006�D
4 �͖� �`���A��J �nj��A�c���@��� �ҁF�u�Z�p�Ȃ̎��Ƃ�n��\�w�͂ւ̒���\�v�C�w���ЁC1999�D
5 ���ۋZ�p����w��C�{��G�r�C����G�C�s�z��G�Җ�F�u���ۋ����͂����߂�A�����J�̋���헪�@�Z�p���炩��̉��v�v�C����J���������C2002�D
6 �� ��C��� ���C����@���v�C�`�� ���C�ē� �_�u�C��� �G��C�R�Z ���� �ҁF�u���㋳��w���T�v�C�J���{��ЁC1988�D
7 �g�c �T�V���F�u�g���������r�L�^�X�̐��E�v�C�i���j�d�g�V���ЁC2004�D
8 �쐼 �^�j�C�ߌ� ����C�R�{ ����F�uPIC�}�C�R���ɂ�郁�J�g���j�N�X����v�CCQ�o�ŎЁC2005�D
9 ���� �q�v�F�u16F84�v���O���~���O�̐��E�ց@�킩��PIC�}�C�R������v�C�������V���ЁC2001�D
10 �����d��Y�Ɓi���j�����E�Z�p���C���Ғ��F�u�v���O�����w�K�ɂ��f�B�W�^������v�C�A�ϓ��o�ŁC1983�D
11 �F�� �����F�u100��ɂ݂�Z���T���p�Z�p�v�C�H�ƒ�����C1993�D
12 ���� �M�F�F�u�Z���T���p141�̎��H�m�E�n�E�v�CCQ�o�ŎЁC2001�D
13 �R�� �O�Y�F�u�g�R�g���₳�����Z���T�̖{�v�C�����H�ƐV���ЁC2002�D
14 �쑺 ��v�C��� ���C�c�� �@�C���� ���O�C���Y ��T�F�u����p�A�N�`���G�[�^�̊�b�v�C�R���i�ЁC2006�D
15 ��� �čs�F�u����t�@���̂��߂̓d�q�p�[�c���m��S�ȁv�C�i���j�d�g�V���ЁC2002�D
16 �R�� ���l, ���c �F�v�F�uUSB�C���^�[�t�F�[�X�𗘗p��������w�K���ނ̌����v�A�R����w��������Z���^�[������, CDROM�ŁA2004�D
17 ���R �����A���c �F�v�F�uPICNIC��p�������u�v���C���䋳�ށv�A�R����w��������Z���^�[������, CDROM�ŁA2005�D
18 �������O�F�u��V�́@VB, VC++,Linux��PICNIC�R���g���[����DLL���g���@PICNICVer.2�̊T�v�ƕt�����C�u�����̎g�����v�CCQ�o�ŎЁC�g�����W�X�^�Z�p,�X����, pp.220-229�C 2001�D
19 �����Ȋw�ȃz�[���y�[�W�@ �@http://www.mext.go.jp/
20 �L����Ѓg���C�X�e�[�g�@ �@http://www.tristate.ne.jp/index.html
21 IT�Z�p���K�i�w���j�iPICNIC�j�@http://cai.cs.shinshu-u.ac.jp/susi/Lecture/picnic-b/
22 �d�q�H��̎������@�@ http://www.picfun.com/
23 IT�p�ꎫ�T�@e-Words�@
�@http://e-words.jp/